Гуманоиды · SKU: UnitreeG1D
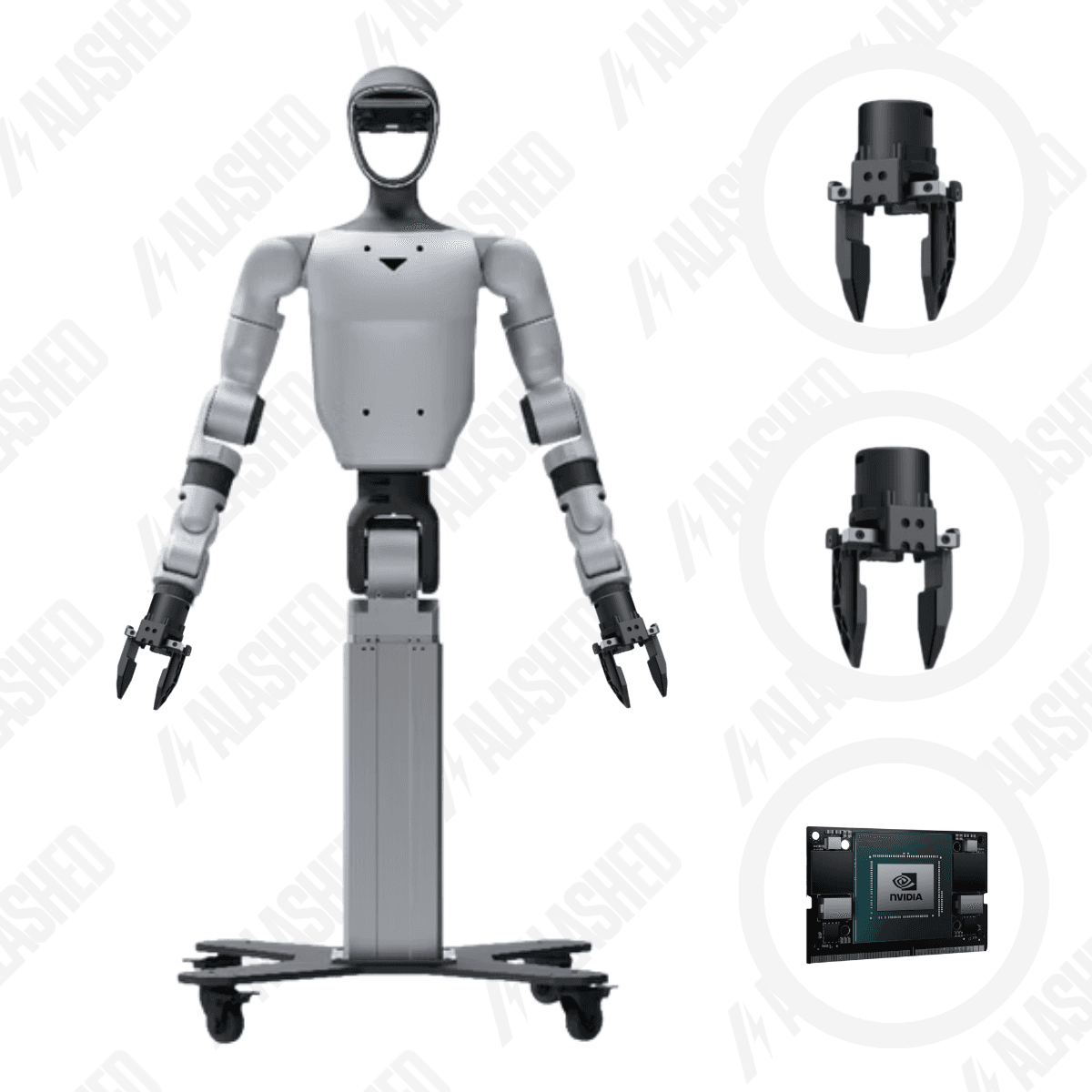
Unitree G1-D
Сквозная платформа данных и обучения для гуманоидного робота
19 473 145 ₸
Выбранная конфигурация: General A (U1)
Модель
На ногах. 19 DOF, 1 DOF кисть с RGB-камерой. Без декстерных рук. Базовая платформа сбора данных.
19-33
DOF
2
Серии
10
Конфигурации
Сквозная платформа
данных и обучения
для гуманоидного робота
Ключевые компоненты

Высокопроизводительный гуманоидный робот
Несколько собственных гуманоидных конфигураций с разработанными компанией приводами, редукторами, энкодерами и сенсорами.

Инструменты сбора данных
Единая платформа для полного цикла работы с данными: сбор, обработка, разметка, проверка и управление дата-активами.

Комплексные инструменты обучения и инференса моделей
Обеспечивает распределённое обучение, разработку пользовательских моделей и их развертывание с полной поддержкой основных open-source фреймворков.
Платформа робота с увеличенным
числом степеней свободы
- Степени свободы робота (без исполнительного устройства):19
- Степени свободы рук:7×2
- Степени свободы талии:2
- Степени свободы колонны:1
- Степени свободы базы:2

Расширенное рабочее пространство
Мобильная конструкция с подъёмным механизмом и колёсной базой
- Вертикальная рабочая зона:0–2 м
- Диапазон вращения талии (Z):±155°
- Диапазон наклона талии (Y):−2,5° ~ +135°

Низкая задержка управления
- Точность подъёма:±0,5 мм
- Точность захвата исполнительного устройства:±0,1 мм
- Задержка телеуправления:< 100 мс
- Частота дискретизации:60 Гц
* Точность зависит от конфигурации исполнительного устройства.

Оптимизированные инструменты сбора данных
Оптимизация сбора данных и снижение затрат за счёт гибких стандартизированных рабочих процессов вместо традиционных ручных операций.

Визуальное управление шаблонами
Интеграция управления проектами, распределения задач, отслеживания прогресса и анализа статуса в единой системе. Шаблонные конфигурации позволяют создавать задачи сбора данных в один клик.

Гибкая конфигурация платформ и исполнительных устройств
Поддержка сбора данных на различных робототехнических платформах и с различными конфигурациями исполнительных устройств. Стандартизация данных обеспечивает сквозную обработку.

Высококонкурентная архитектура
Поддержка одновременной работы сотен роботов. Балансировка нагрузки и масштабируемая архитектура обеспечивают приём и обработку больших потоков данных в реальном времени.

Круглосуточный сбор данных
Высокодоступная архитектура обеспечивает стабильный сбор 24/7. Поддержка широкого спектра форматов позволяет экспортировать данные напрямую или конвертировать их в распространённые форматы обучения.
Конвейер сбора данных

Создание задач

Редактирование и назначение

Сбор и разметка данных

Загрузка и проверка

Хранение

Экспорт данных
Инструменты обучения и инференса
Поддержка полного цикла — от обработки данных до развёртывания модели в один клик. Интеграция с основными open-source робототехническими фреймворками.

Визуальное управление шаблонами
Единая платформа для управления проектами и задачами обучения. Готовые шаблоны ускоряют запуск экспериментов и контроль прогресса.

Экосистема моделей
Открытая модельная экосистема с встроенными датасетами сообщества. Интеграция с моделями PI и GROOT.

Быстрое развертывание
Готовность к работе «из коробки». Обучение в один клик, встроенные инструменты симуляции и перенос алгоритмов на реальную платформу.

Распределённое обучение
Высокопроизводительная архитектура распределённого обучения. Динамическое масштабирование вычислительных ресурсов. До 90% загрузки GPU.
Конвейер обучения

Выбор архитектуры модели

Настройка обучения

Мониторинг в реальном времени

Редактирование параметров

Тестирование в симуляции

Экспорт и развертывание
Сценарии применения

Сервис

Быт

Ритейл

Промышленность
UnifoLM-WMA-0
Архитектура World-Model-Action
UnifoLM-WMA-0 — open-source архитектура Unitree, объединяющая различные типы робототехнических конфигураций для задач общего назначения. Ключевой компонент — world-model, моделирующая физические взаимодействия между роботом и окружающей средой.
Режим принятия решений
Формирование действий на основе точного прогнозирования
Система анализирует состояние среды и задачи, прогнозирует физические взаимодействия и формирует управляющие действия с высокой точностью.

Режим симуляции
Высокоточная обратная связь для генерации данных
Интерактивный симулятор формирует синтетические данные для обучения и оптимизации политики управления.
Технические параметры

Механические размеры
| Модель | G1-D (Стандарт) | G1-D (Флагман) |
| Габаритные размеры (мин. высота колонны) | 1260 × 500 × 500 мм | 1260 × 525 × 570 мм |
| Габаритные размеры (макс. высота колонны) | 1680 × 500 × 500 мм | 1680 × 525 × 570 мм |
| Вес (включая аккумулятор) | ≈50 кг | ≈80 кг |
| Общее количество степеней свободы (без исполнительного устройства) | 17 | 19 |
| Степени свободы одной руки (без исполнительного устройства) | 7 | 7 |
| Максимальная нагрузка на одну руку | ≈3 кг | ≈3 кг |
| Варианты исполнительных устройств | 2-пальцевый / 3-палый (±тактильный) / 5-палый | 2-пальцевый / 3-палый (±тактильный) / 5-палый |
| Степени свободы талии | 2 | 2 |
| Диапазон движения талии | Z: ±155°, Y: −2,5° ~ +135° | Z: ±155°, Y: −2,5° ~ +135° |
| Скорость подъёма колонны | ≈60 мм/с | ≈60 мм/с |
База
| Максимальная скорость | / | 1,5 м/с |
| Тип привода | / | Дифференциальный, разворот на месте 360° |
| Сенсоры шасси | / | Лидар ×1 + Камера глубины ×2 + Датчики столкновения ×2 + Датчики низких препятствий ×2 |
Электрические характеристики
| Базовая вычислительная мощность | 8-ядерный высокопроизводительный CPU | 8-ядерный высокопроизводительный CPU |
| Система восприятия | Бинокулярная HD-камера на голове ×1 + HD-камеры на запястьях ×2 | Бинокулярная HD-камера на голове ×1 + HD-камеры на запястьях ×2 |
| Wi-Fi 6, Bluetooth 5.2 | Да | Да |
Аксессуары
| Модуль повышенной вычислительной мощности | NVIDIA Jetson Orin NX 16 ГБ (100 TOPS) | NVIDIA Jetson Orin NX 16 ГБ (100 TOPS) |
| Аккумуляторы | Верхний (быстросъёмный): 9 А·ч | Аккумулятор шасси (встроенный): 30 А·ч |
| Ручной контроллер | Да | Да |
| Визуализационный компьютер | Да | Да |
Прочее
| Автономность | ≈2 часа | ≈6 часов |
| Интеллектуальное OTA-обновление | Да | Да |
| Возможность вторичной разработки | Да | Да |
[1] Максимальная нагрузка зависит от конфигурации и положения руки.
[2] Для выбора исполнительного устройства обратитесь в отдел продаж.
[3] Подробности — в руководстве по вторичной разработке.
[4] Гарантийные условия — в гарантийной документации.
[5] Параметры могут отличаться в зависимости от конфигурации и условий эксплуатации.